Damit Algorithmen konkrete Aufgaben in der echten Welt erfüllen können – wie beispielsweise das Steuern eines Fahrzeugs – müssen diese zuerst trainiert werden. Für das Training sind jedoch umfangreiche Daten nötig, welche zunächst beschafft werden müssen. Bei sicherheitskritischen Aufgaben wie dem Steuern eines Fahrzeugs, müssen möglichst realitätsnahe Daten für das Training eingesetzt werden. Aus diesem Grund werden in der Regel echte Straßenszenen verwendet, das bedeutet jedoch, dass zuerst diese Szenen im realen Straßenverkehr durch ein Fahrzeug aufgenommen werden müssen.
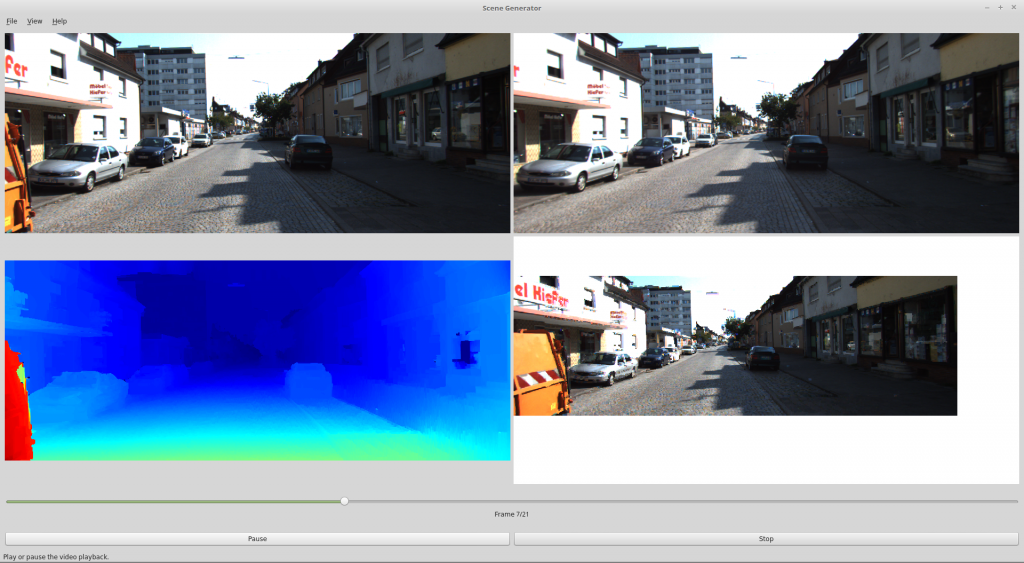
Im Projekt Mixed Reality Szenengenerator wurde eine Software entwickelt, die unter anderem einen Ansatz bieten soll, diese Problemstellung zu lösen. Die verfolgte Idee dabei war es, einmal aufgenommene Straßenszenen nachträglich zu verändern, um diese somit mehrmals zum Training einsetzen zu können. Dafür wurde eine Software umgesetzt, die es ermöglicht stereoskopische Bilder zu laden und daraus Punktwolken zu erstellen. In diese Punktwolken können dann Objekte wie 3D Modelle geladen und in der Szene platziert werden.
Zusätzlich bietet der Mixed Reality Szenengenerator unterschiedliche Methoden zum Im- und Export der Punktwolken, so dass diese auch in anderen Programmen weiterverwendet werden können.